4 Degrees of Freedom Robot Arm With a Twist
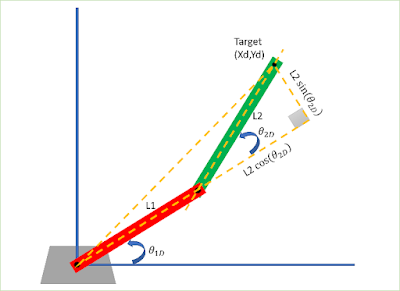
4 Degrees of Freedom Robot Arm With a Twist STM32F4 - Processor in the Loop Inverse Kinematics of a Two-Link Planar Elbow Manipulator (Symbolic Math) Solving the 4 Degree of Freedom (Matlab Script) Simulink Matlab Function Block Implementation Simulation with Simscape Multibody Processor in the loop with STM32F4 Discovery Board What we need Results Next Steps This is a documentation of steps being done to be able to solve the 6 Degree of Freedom Robot Arm bought online. This goes through the process of solving the inverse kinematics of a Two-Link Planar Elbow Manipulator which is the basis of our case. Wrist and Clamps was not solve here &_& Inverse Kinematics of a Two-Link Planar Elbow Manipulator x d , y d = location of the tip of the manipulator q 1d , q 2d = angles of the links (counter-clockwise is positive) q 3d = dummy angle q 4d = dummy angle L1, L2 = lengths of the l...