4 Degrees of Freedom Robot Arm With a Twist
4 Degrees of Freedom Robot Arm With a Twist
STM32F4 - Processor in the Loop
- Inverse Kinematics of a Two-Link Planar Elbow Manipulator (Symbolic Math)
- Solving the 4 Degree of Freedom (Matlab Script)
- Simulink Matlab Function Block Implementation
- Simulation with Simscape Multibody
- Processor in the loop with STM32F4 Discovery Board
- What we need
- Results
- Next Steps
This is a documentation of steps being
done to be able to solve the 6 Degree of Freedom Robot Arm bought online. This goes through the process of solving
the inverse kinematics of a Two-Link Planar Elbow Manipulator which is the
basis of our case.
Wrist and Clamps was not solve here &_&
Wrist and Clamps was not solve here &_&
Inverse Kinematics of a Two-Link Planar Elbow Manipulator
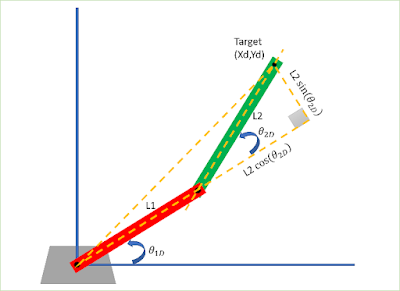
xd, yd = location of the tip of the
manipulator
q1d, q2d = angles of the links (counter-clockwise
is positive)
th2d :=
Symbol::subScript(Symbol("theta"),"2d"):
th3d :=
Symbol::subScript(Symbol("theta"),"3d"):
th4d :=
Symbol::subScript(Symbol("theta"),"4d"):
L1 := Symbol::subScript(Symbol("rho"),1):
L2 := Symbol::subScript(Symbol("rho"),2):
th1d, th2d, th3d, th4d, L1, L2;

We can be
able to add the L1 and L2cos(q2d) as X and L2sin(q2d) as Y

assume(L1 > 0
and L2 > 0 ):
eq6 := op(solve(eq5,cos(th2d)),1);

Solving from the top:

newth1des =
th1des+th2des;
Solving the 4 Degree of freedom:
This is to check that the solution that we have from the
Symbolic Math Toolbox is correct or not
%% Define
the Target Location
%% Top
view angle : th0 (base angle)
%solve for
the angle
% This is
just for Visualization, you only need to get the th1des and
%
translate to solve from the top
newxl2 =
l2*cosd(newth1des);
newxl3 =
l3*cosd(newth2des);
subplot(1,2,1)
subplot(1,2,2)
This is for a fixed 45 Degree angle at the bicep

xd, yd = location of the tip of the manipulator
th2d := Symbol::subScript(Symbol("theta"),"2d"):
th3d := Symbol::subScript(Symbol("theta"),"3d"):
th4d := Symbol::subScript(Symbol("theta"),"4d"):
L1 := Symbol::subScript(Symbol("rho"),1):
L2 := Symbol::subScript(Symbol("rho"),2):
th1d, th2d, th3d, th4d, L1, L2;

We can be able to add the L1 and L2cos(q2d) as X and L2sin(q2d) as Y

eq6 := op(solve(eq5,cos(th2d)),1);

Solving from the top:

newth1des =
th1des+th2des;
newth2des =
th1des;
Solving the 4 Degree of freedom:
This is to check that the solution that we have from the
Symbolic Math Toolbox is correct or not
%% Solving
for a 4 Degree of Freedom Robot ARM
% this is
just an example of solving 4 DoF Robot ARM via making one link
%
(Stationary) from 0 to 360
%% Define
the Target Location
xt = 0.5;
yt = 0.5;
zt = 0.5;
%% Define
your robot arm body parameters
l1 = 1;
l2 = 1;
l3 = 1;
h0 = 0;
%% Top
view angle : th0 (base angle)
% solve
for th0
th0 =
atand(yt/xt);
if th0 < 0
th0 = th0+180;
elseif isnan(th0)
th0 = 90;
end
display(th0)
%% For
loop for Visualization
% we need
to imagine that we have moved into a different Dimention hence
% you can
si that we have change the angle to line lenghts to ut and wt
wt = sqrt(xt^2 +
yt^2);
% Find the
distance from the base of the bicep to the target
dist2target =
sqrt(wt^2 + (zt-h0)^2);
ut =
sqrt(dist2target^2 - wt^2);
%solve for
the angle
angle =
atand(ut/wt);
for counter = 0:360
th1 = counter;
xb =
l1*cosd(th1);
yb =
l1*sind(th1);
% solve
the th1des and th2des with the ik_doublelink that we have solved
% earlier
from our MuPad
[th1des, th2des]
= ik_doublelink_mathworks(wt-xb,ut-yb,l2,l3);
% This is
just for Visualization, you only need to get the th1des and
% th2des
(Solving X and Y)
xl2 =
l2*cosd(th1des);
yl2 =
l2*sind(th1des);
xl3 =
l3*cosd(th1des+th2des);
yl3 =
l3*sind(th1des+th2des);
%display
the x,y and r value
display([wt ut
dist2target])
display([th1
th1des th2des])
%
translate to solve from the top
%
basically we made a PARALLELOGRAM from the solution with th1des and th2des
% and the
angle origin 0 is on the +X axis
newth1des =
th1des+th2des;
newth2des =
th1des;
newxl2 =
l2*cosd(newth1des);
newyl2 =
l2*sind(newth1des);
newxl3 =
l3*cosd(newth2des);
newyl3 =
l3*sind(newth2des);
subplot(1,2,1)
plot(wt,ut,'rx')
xlim([-1 2]);
ylim([-1 2]);
hold on
plot([0,xb],[0,yb])
plot([xb,xb+xl2],[yb,yb+yl2])
plot([xb+xl2,xb+xl2+xl3],[yb+yl2,yb+yl2+yl3])
subplot(1,2,2)
plot(wt,ut,'rx')
xlim([-1 2]);
ylim([-1 2]);
hold on
plot([0,xb],[0,yb])
plot([xb,xb+newxl2],[yb,yb+newyl2])
plot([xb+newxl2,xb+newxl2+newxl3],[yb+newyl2,yb+newyl2+newyl3])
pause(0.1)
end
This is for a fixed 45 Degree angle at the bicep

This is for a fixed 0-360 Degree angle at the bicep

Simulink Matlab Function Block Implementation:

function
[tAngle,bAngle,fAngle,wAngle] = IK(xt,yt,zt)
%#codegen
persistent th0 th1 th2 th3
%
Initialize joint angles on the first pass
if isempty(th0)
th0 = 0;
th1 = 60;
th2 = 0;
th3 = 0;
end
l1 = 1;
l2 = 1;
l3 = 1;
h0 = 0;
% solve
for th0
th0 = 90 -
atand(xt/yt);
if isnan(th0)
th0 = 90;
end
wt = sqrt(xt^2 +
yt^2);
% Find the
distance from the base of the bicep to the target
dist2target =
sqrt(wt^2 + (zt-h0)^2);
ut =
sqrt(dist2target^2 - wt^2);
%solve for
the angle
%angle =
atand(ut/wt);
xb =
l1*cosd(th1);
yb =
l1*sind(th1);
[th1des, th2des]
= ik_doublelink_mathworks(wt-xb,ut-yb,l2,l3);
% translate
to solve from the top
%
basically we made a PARALLELOGRAM from the solution with th1des and th2des
% and the
angle origin 0 is on the +X axis
th2 =
th1des+th2des;
th3 = th1des;
tAngle = th0;
bAngle = th1;
fAngle = th2;
wAngle = th3;
end
function [th1des,th2des]
= ik_doublelink_mathworks(xd,yd,l1,l2)
if sqrt(xd^2 +
yd^2) < l1+l2
% Calculate the forearm link angle
c2 = (xd.^2 + yd.^2 - l1^2 -
l2^2)/(2*l1*l2);
s2 = sqrt(1 - c2.^2);
th2des = atan2(s2, c2);
else % protect
for relative floating point accuracy at th2 = 0
c2 = 1;
s2 = 0;
th2des = 0;
end
%
Calculate the bicep link angle
k1 = l1 + l2*c2;
k2 = l2*s2;
% Mantain
the sign of th1 positive
if xd < 0
&& yd < 0 % if point is in the third quadrant add 2*pi
th1des = 2*pi + atan2(yd, xd) - atan2(k2,
k1);
else
th1des = atan2(yd, xd) - atan2(k2, k1);
end
th1des =
rad2deg(th1des);
th2des =
rad2deg(th2des);
end
Simulation with Simscape Multi Body


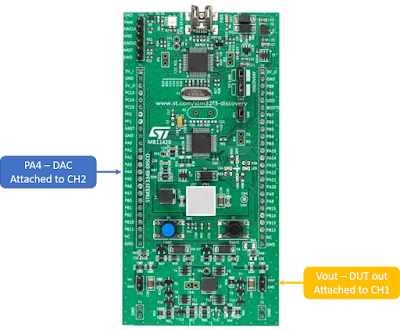
Processor in the loop with STM32F4 Board
What we need:
- STM32F4Discovery Board
- USART Serial Converter (FTDI Basic)
- Two jumper wires for TX and RX
- STM32-Mat Support Package for Matlab/Simulink
- Matlab/Simulink License
- Matlab
- Simulink
- Matlab Coder
- Simulink Coder
- Embedded Coder


Results:

There is no difference between the simulation model and the
code being generated and deployed to the STM32f4Discovery Board (Check Scope 2
Output)

The function IK is being called every 0.001 secs
(fundamental timestep), according to the Code Execution profile of the IK
function, the Maximum Execution time is around 339905 which we need to multiply
by 1e-09 (Default time setting for the measurement) hence the IK Algorithm to
solve the 4 DoF angles would take about 339.91 micro seconds hence calling the function
every 1 milli
seconds is enough to finish the
function in solving the IK of the 4 DoF link arm.
Next Steps:
- Conversion of the Degrees to Servo Motor Control Signal
- Need to add in a 3.3v to 5.0v converter since the STM32Discovery Boards are operating at 3.3 volts
Credits to Mathworks and my Techsource AEG


Comments
Post a Comment